Digital PDFs
Documents
Guest
Register
Log In
>
XX-5A452-9E
May 2000
12 pages
Quality
Original
0.8MB
view
download
Document:
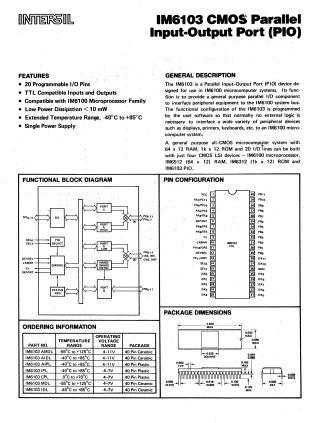
IM6103
Order Number:
XX-5A452-9E
Revision:
Pages:
12
Original Filename:
http://bitsavers.org/pdf/dec/pdp8/cmos8/_dataSheets/IM6103.pdf
Home
Privacy and Data
Site structure and layout ©2025 Majenko Technologies